
Linn Danielsen Evjemo is one of the PhD-candidates of SFI Manufacturing. In this blog, she takes us along on a journey about additive manufacturing using industrial robots.
My name is Linn Danielsen Evjemo, and I started my PhD work in December 2016. My project is focused on large-scale, robotized additive manufacturing (AM) using industrial robot arms, with a special focus on cold metal transfer welding (CMT). The aim is to combine the large workspace of an industrial robot arm with the flexibility and relative affordability of traditional AM methods.
Early in my PhD I did some preliminary experiments together with PostDoc Signe Moe (also part of SFI Manufacturing), building a simple cup-structure in a viscous glue using a UR-5 robot manipulator, as shown in figure 1A. The cup structure, shown in figure 1B, was built from the bottom-up in a continuous helix-path, which separates this from traditional AM methods that require the build to be done strictly layer-by-layer.
My name is Linn Danielsen Evjemo, and I started my PhD work in December 2016. My project is focused on large-scale, robotized additive manufacturing (AM) using industrial robot arms, with a special focus on cold metal transfer welding (CMT). The aim is to combine the large workspace of an industrial robot arm with the flexibility and relative affordability of traditional AM methods.
Early in my PhD I did some preliminary experiments together with PostDoc Signe Moe (also part of SFI Manufacturing), building a simple cup-structure in a viscous glue using a UR-5 robot manipulator, as shown in figure 1A. The cup structure, shown in figure 1B, was built from the bottom-up in a continuous helix-path, which separates this from traditional AM methods that require the build to be done strictly layer-by-layer.
 |  |
Figure 1A and 1B: Images from proof-of-concept experiment using robot manipulator and an air-pressure driven caulking gun.
The focus has later been on building metal structures using arc-welding, mostly CMT. These experiments have been done in collaboration with technician Morten Høgseth Danielsen, and later also PhD fellow Geir Langelandsvik, at SINTEF Industry. In the first experiments, a simple box structure was built in a semi-layer-wise manner using aluminum, in order to map the basic challenges related to temperature and material behavior for a continuous build.
The focus has later been on building metal structures using arc-welding, mostly CMT. These experiments have been done in collaboration with technician Morten Høgseth Danielsen, and later also PhD fellow Geir Langelandsvik, at SINTEF Industry. In the first experiments, a simple box structure was built in a semi-layer-wise manner using aluminum, in order to map the basic challenges related to temperature and material behavior for a continuous build.
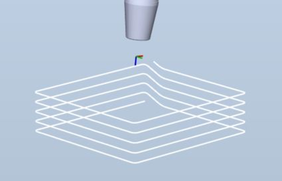 | 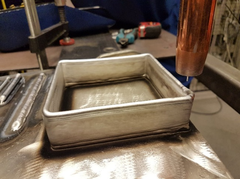 |
Figure 2A and 2B: 2A shows a simulation of the path used to build the aluminum box structure shown in 2B, which has dimensions 12 x 12 cm2. The layer height in the simulation in 2A is not representative of the actual welding process.
We have later focused on challenges related to intersections within each layer, as well as keeping a build going (close to) continuously. This has been tested both with aluminum and with a nickel alloy (Inconel 625), the latter shown in figure 3B and 3C. As can be expected, it was easier to keep the shape of the structure under control when using a metal with a higher melting point, because this made the structure less likely to distort as the build went along and the temperature rose.
We have later focused on challenges related to intersections within each layer, as well as keeping a build going (close to) continuously. This has been tested both with aluminum and with a nickel alloy (Inconel 625), the latter shown in figure 3B and 3C. As can be expected, it was easier to keep the shape of the structure under control when using a metal with a higher melting point, because this made the structure less likely to distort as the build went along and the temperature rose.
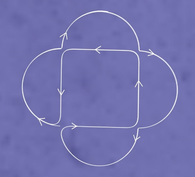 | 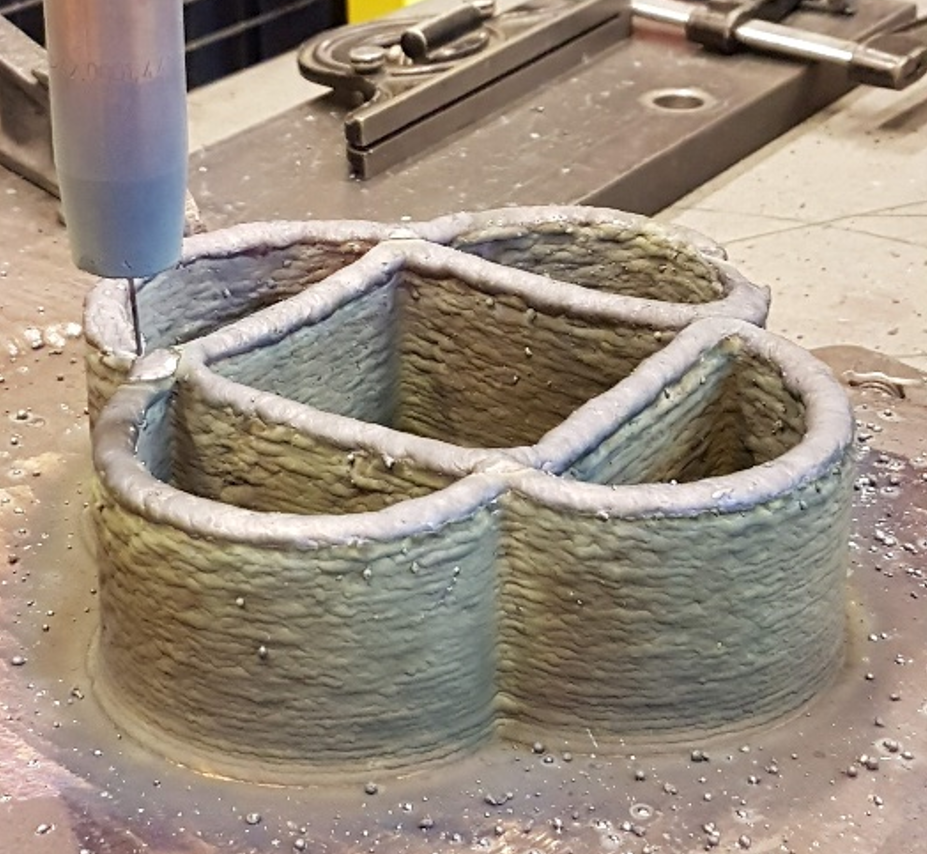 |  |
Figure 3A, 3B and 3C: Here we can see the path for the weld in order to avoid actual crossings within each layer, and the final metal structure before and after processing. The dimensions are approximately 16 x 16 cm2.
The next step will be to advance to more complex structures, and to try and exploit the freedom in orientation of the robot arm to build structures that could not be built using traditional AM methods.
The next step will be to advance to more complex structures, and to try and exploit the freedom in orientation of the robot arm to build structures that could not be built using traditional AM methods.

 RSS Feed
RSS Feed
